操作简便
通过拖拽式操作与图形化组件,实现直观的配置及设备管理。
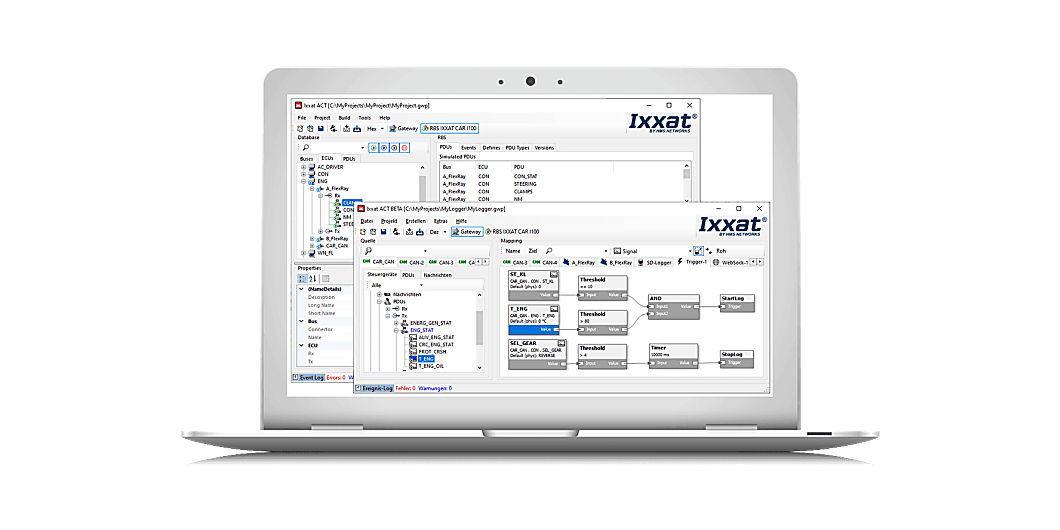
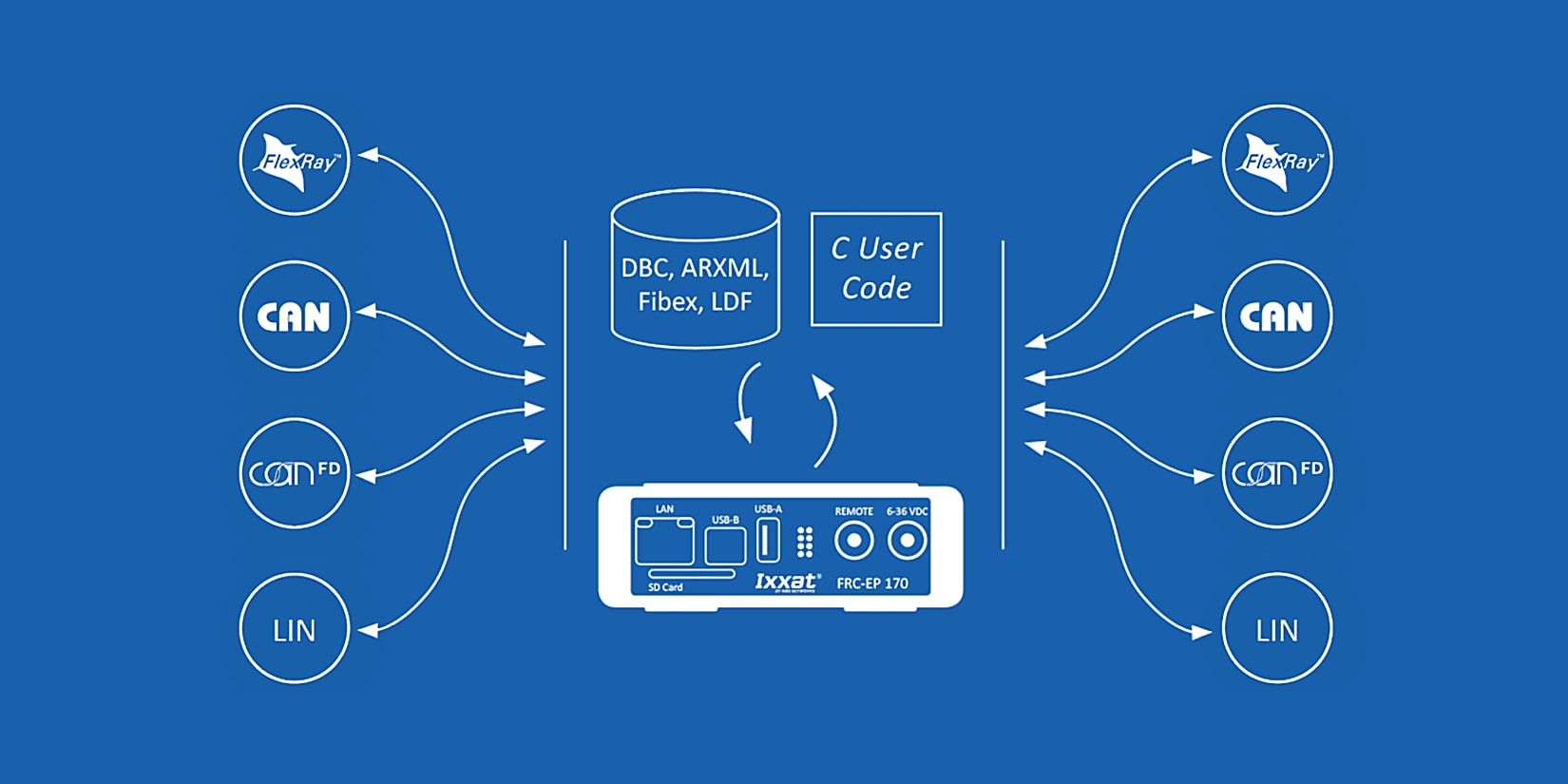
高级配置工具(ACT) 是一款功能强大、操作简便的 Windows PC 端配置软件。该工具专为 Mobilizer、CANnector 和 FRC-EP 系列的计算网关而设计,支持创建包括剩余总线仿真(RBS) 功能在内的完整配置。配置完成后,用户可将其下载至设备独立运行。
通过拖拽式操作与图形化组件,实现直观的配置及设备管理。
灵活适配多种应用需求——提供三种不同版本,支持通过 C 语言用户代码和/或集成 Matlab/Simulink 模型,轻松扩展定制化功能。
支持多种主流数据库格式,包含DBC、LDF、Fibex与ARXML。
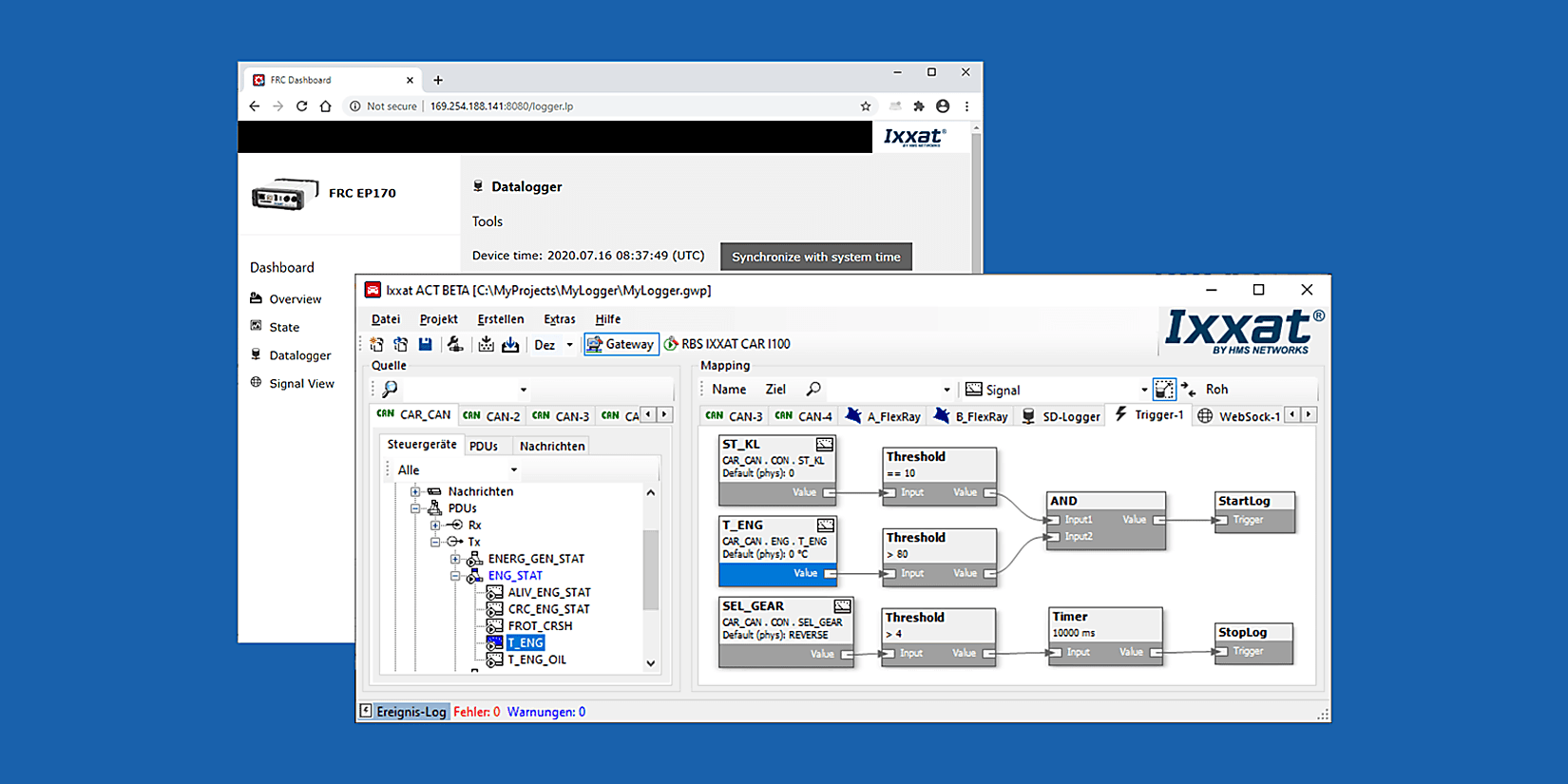

只需使用 ACT 工具的“网关视图”,通过拖放操作即可轻松完成源与目标之间的映射关系配置。无论目标是实际总线系统、用户代码、日志记录器或其他模块,仅需将所需数据从源总线拖动至目标,即可完成配置。配置完成后,可将其加载至 Ixxat 嵌入式平台,实现独立运行。
上述接口均可选用相应的总线描述文件(如 DBC、LDF、ARXML),但并非必须。如果使用描述文件,可通过信号选择和映射功能快速完成基于信号的网关配置。支持将来自不同源报文的信号组合映射至一个目标报文。
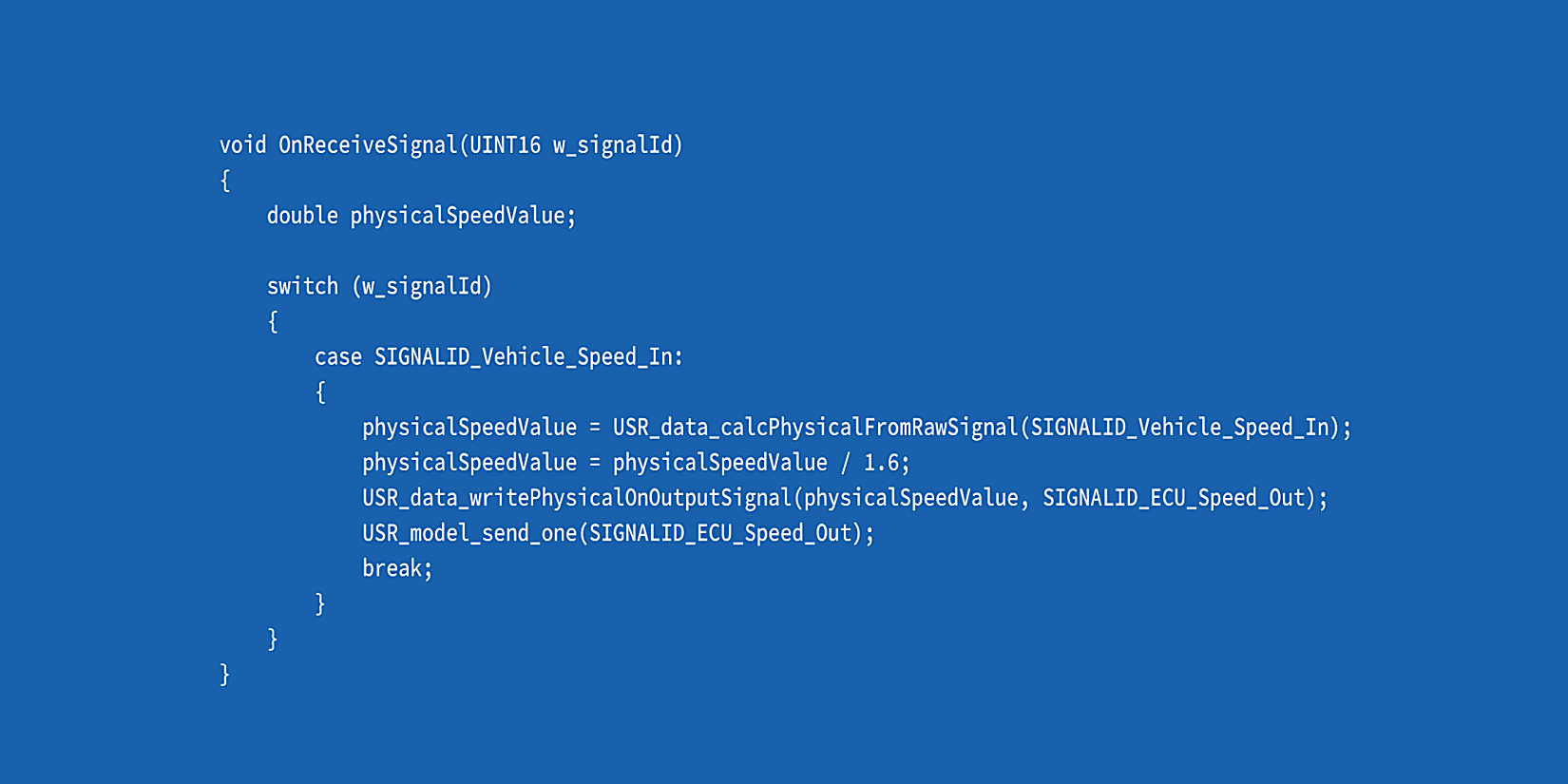
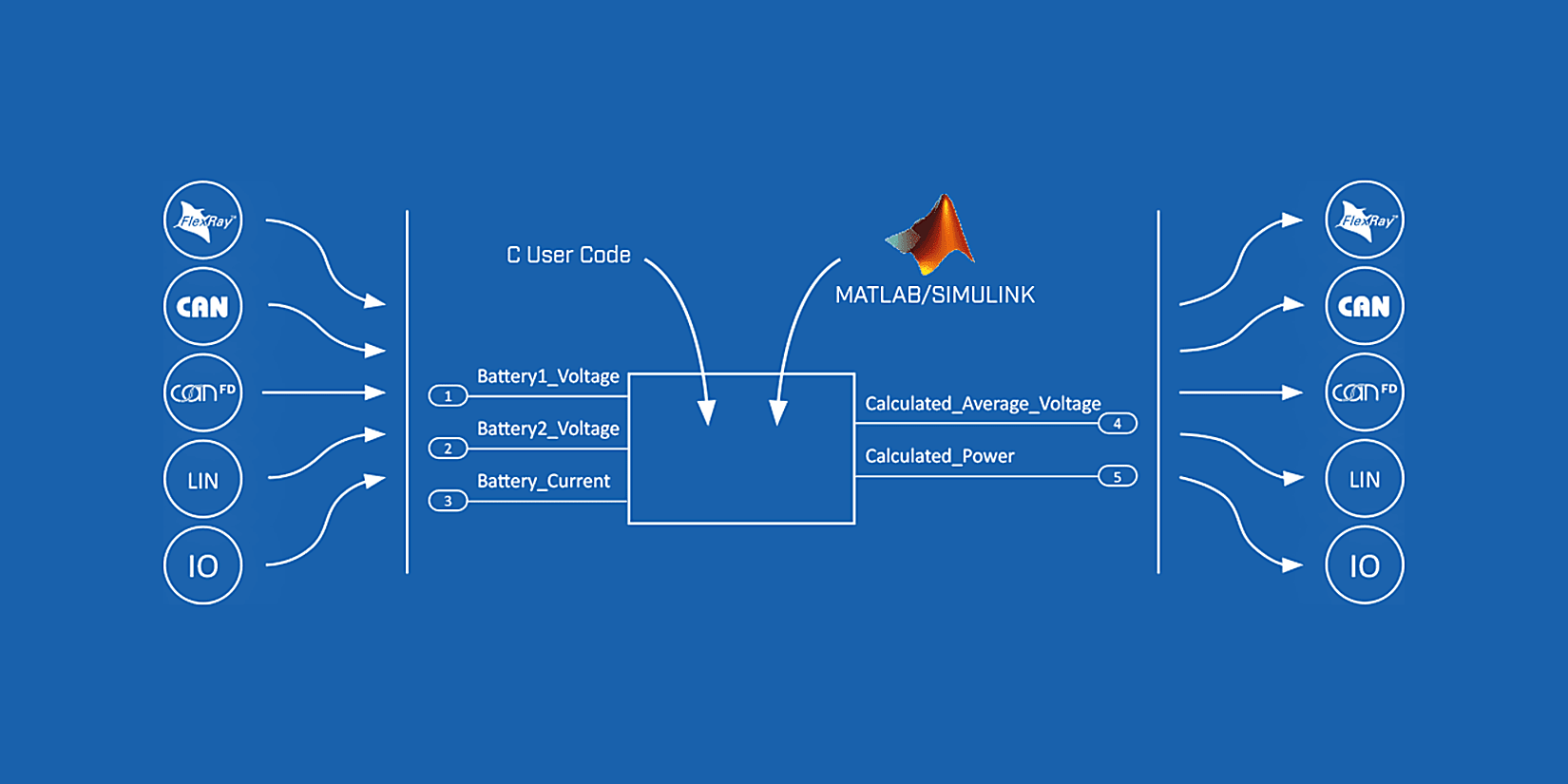
当源与目标信号的物理表示不一致时,可启用自动信号转换功能,或通过用户代码、MATLAB/Simulink 模型进行复杂的信号处理与转换。
目标总线的帧发送方式支持以下选项:
对于无需变化的信号,可配置为使用静态默认值。该值可来自总线描述文件,亦可由用户自定义设置。
LIN-2-CAN网关的配置:

配置完成,立即运行
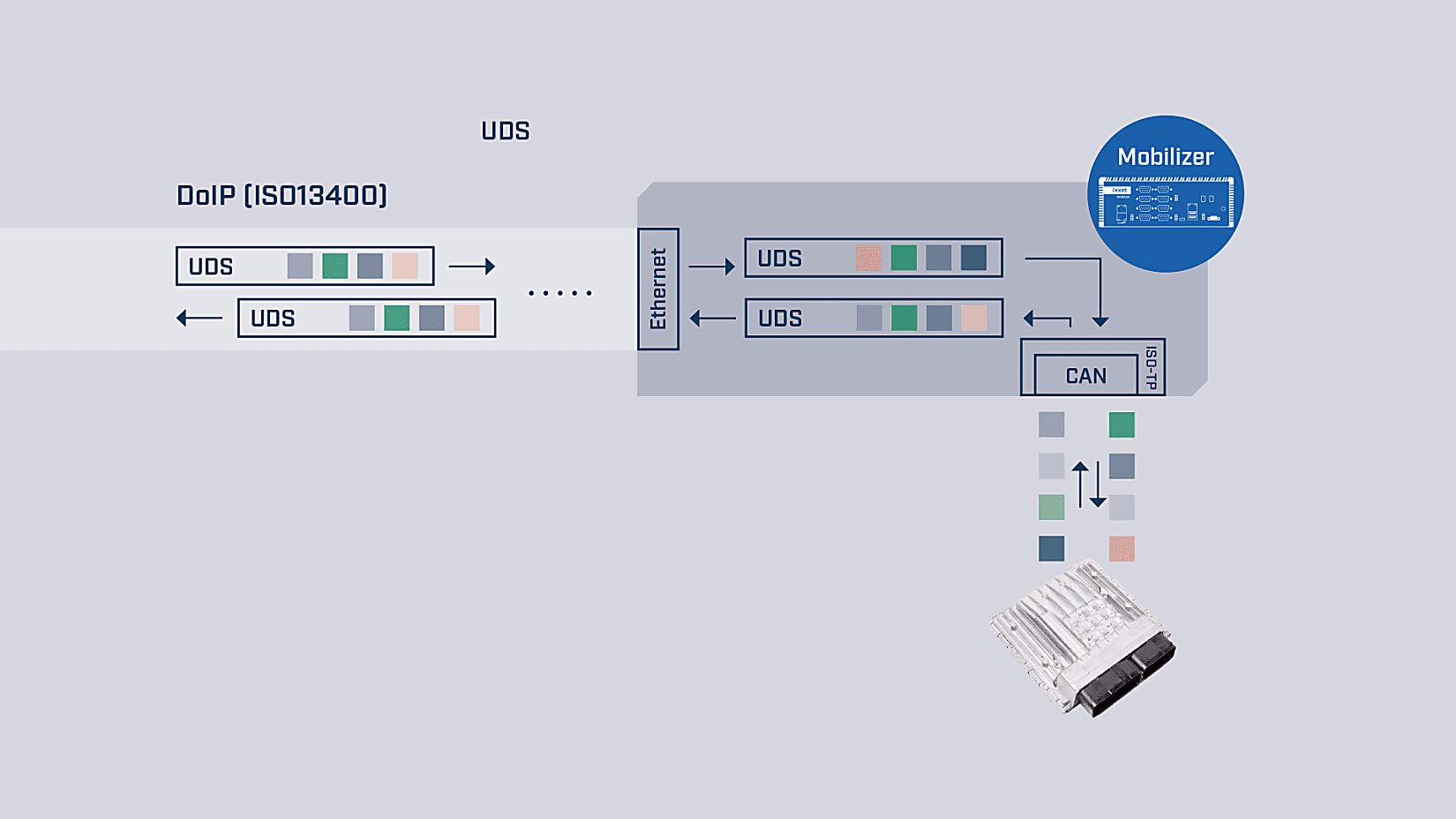
如需将基于 CAN(FD)、FlexRay 或 LIN 的系统集成至 EtherCAT 网络,只需选用带 EtherCAT 扩展模块的 CANnector、Mobilizer 或 FRC-EP 系列设备。在 ACT 中通过拖放方式即可实现与 EtherCAT 从站的信号映射。ACT 同时自动生成 ESI 文件,可用于支持 EtherCAT 的主站中,简化 EtherCAT 网络的整体配置。
一旦接入 EtherCAT,所有源自 CAN(FD)、FlexRay、LIN 总线或其他 EtherCAT 设备的数据均可在统一通信架构中实现同步分发,连接至 PLC 或上位机系统,实现高效控制与测试管理。
FRC-EP、Mobilizer 和 CANnector 设备提供模拟及数字输入输出接口。ACT 支持将 I/O 信号与其他总线信号统一管理。用户可配置信号方向、数值范围、转换规则及单位,并通过拖放方式实现信号映射。
ACT 支持添加虚拟总线,用于定义用户自定义变量(环境变量)。这些变量可与其他总线系统之间进行映射,亦可通过 C 用户代码模块进行计算,再用于系统内其他总线的信号传输。
网关功能支持根据不同物理与逻辑总线间的映射关系自动生成 DBC 文件,支持 CAN、CAN FD、通用以太网、虚拟 CANonEthernet 及 CAN@net 等通信协议。
如无需使用复杂的 XCPonEthernet 协议,可选择更简洁的 Fast Data Exchange(FDX)协议,将第三方软件与 CANnector、Mobilizer 或 FRC-EP 系列设备进行集成。所有信号均可通过 ACT 拖放方式完成与 FDX 总线的映射,ACT 同时生成相应的 XML 描述文件,导入至第三方软件后,即可实现数据读写。
若需减少布线或实现远距离通信,可使用 Ixxat 通用以太网协议。该协议可将 CAN(FD)、FlexRay 或 LIN 总线虚拟化为以太网传输,通过 ACT 工具完成数据与通用以太网总线之间的映射配置。
数据可通过以太网分发,并由对端的 CANnector、Mobilizer 或 FRC-EP 设备恢复为物理总线协议,实现经典的“远程延伸”功能。
若需直接连接至 PC,可使用 VCI 驱动将设备作为远程接口。
最多支持配置 16 个虚拟总线,可将数据同时分发至多达 16 个 IP 地址或端口,构建灵活的以太网通信网络,在网络末端继续使用传统总线协议(如 CAN(FD)、FlexRay 或 LIN)。
通用以太网协议同时支持 Ixxat CAN@net 与 CANnector、Mobilizer、FRC-EP 设备间的组合使用,可将接口扩展至最多 136 路 CAN 或 72 路 CAN FD。
若 Windows PC 不支持 VCI 驱动,通用以太网协议仍可在任意操作系统中轻松集成。最简单的接入方式为使用终端程序收发数据,适配灵活、开发门槛低。
以下工作均由 ACT工具自动完成:
上述全部流程均通过配置向导完成,无需编写任何代码。如需自定义 RBS 行为,也可在自动生成的模块中插入用户自定义代码或算法。最终,完整配置(包括 RBS 功能)将由 Mobilizer 或 FRC-EP 系列设备独立运行。
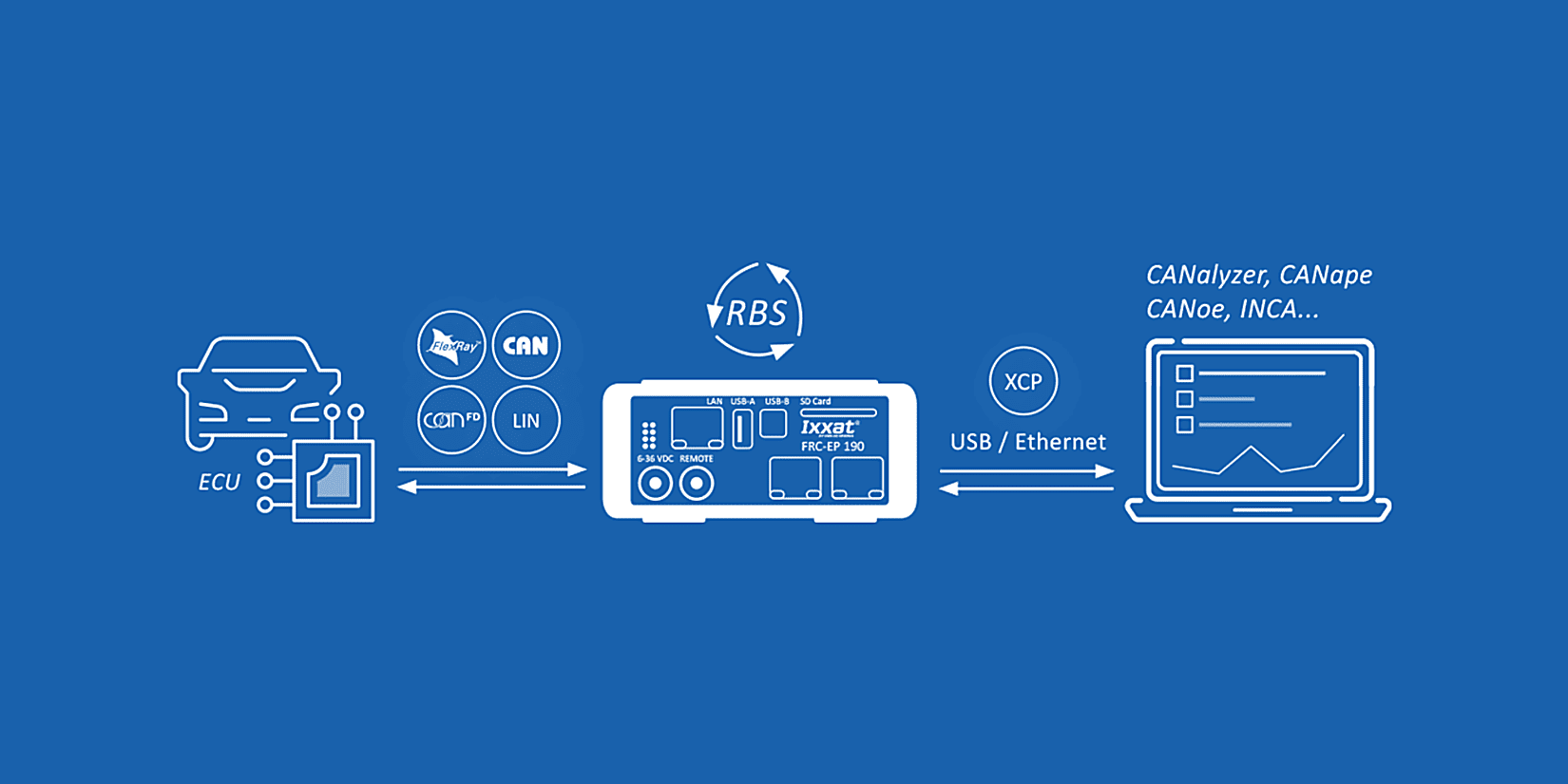
基于 FlexRay/CAN 的 RBS 与 XCPonEthernet 拓展功能,用户可对 RBS 所发送的信号进行定义与操控,包括以下操作:
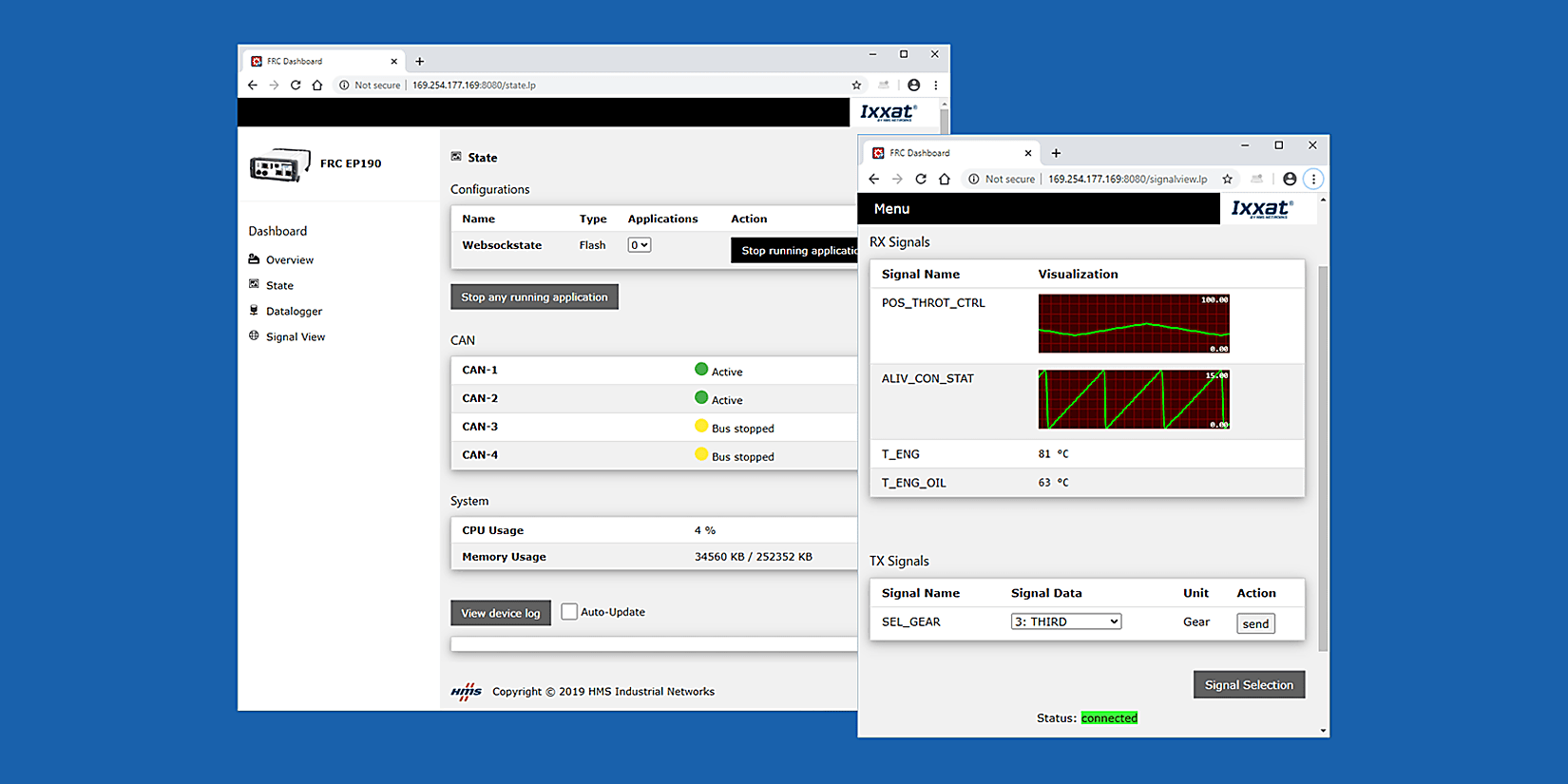
您可以根据需要自由选择要可视化的信号,并设定以文本或图形形式进行显示。可视化配置既可以保存在 CANnector、Mobilizer 或 FRC-EP 系列设备上,也可以保存在可视化终端上。这种方式既支持按用户个性化保存视图,也支持由配置人员预设可见内容范围。

需要专属的可视化界面?
如果默认提供的可视化功能无法满足您的需求,也可以轻松集成自定义的 HTML5 可视化页面。您只需接入标准化的数据交换流,即可实现自定义显示与交互。
IxAdmin 是一款适用于 FRC-EP 系列、Mobilizer 和 CANnector 平台的 PC 端管理工具(免费软件),可通过 USB、以太网或 Wi-Fi 进行连接。
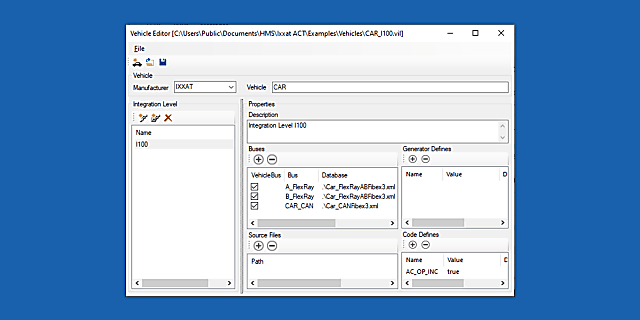
大多数应用场景的基础是各类总线描述文件,例如 CANdB、DBC、LDF、FIBEX 或 AUTOSAR-XML。这些描述文件通常包含大量信息,但往往缺少诸如 CRC 校验、校验和、Alive 计数器算法等关键细节,而这些信息对于生成如残余总线仿真(RBS)等功能至关重要。
通过车辆编辑器,用户可以构建一个完整的车辆描述数据库,包含所有所需信息。若在测试应用生命周期中发生变更(例如车辆集成等级更新),可基于原有数据创建新的数据库变体,从而便捷地迁移现有的残余总线或网关配置。这不仅节省时间,还能有效降低对已验证测试配置引入错误的风险。